
| Quote: |
.
| Quote: |



 ) used concrete. Can I use
clay? Actually, I don't have clay either, but what if I crush up some earthenware pots, can I make clay from that and bake it in my kitchen
stove?
) used concrete. Can I use
clay? Actually, I don't have clay either, but what if I crush up some earthenware pots, can I make clay from that and bake it in my kitchen
stove?| Quote: |
| Quote: |
which is exactly where I am , going to build a good old Labtech Stir - Rite , model 1 , serial number 1 | Quote: |
| Quote: |
So I figured it was safer to have the output unambiguously energized any time the circuit is powered up , and put a small load across the
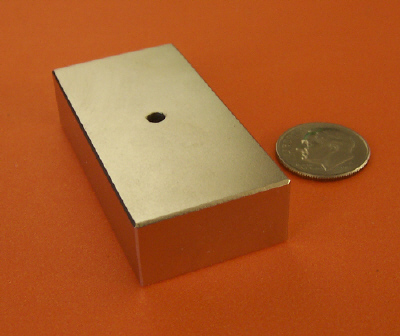
output to assure this . , that's right the big one , The motor manufacturers should just build 'em this
way to begin with , and save me the trouble of putting them right But the
magnets are sort Hey trust me it's for real .| Quote: |
IIRC these were limited manufacture by Talboys from twenty years ago . The point being that the same manufacturer also makes puny little| Quote: |


Quote: Originally posted by labfix  |
| Quote: Originally posted by kmno4 |
| Quote: Originally posted by neelin |
| Quote: Originally posted by kmno4 |
| Quote: Originally posted by neelin |
| Quote: Originally posted by arsphenamine |
| Quote: Originally posted by kmno4 |
| Quote: Originally posted by kmno4 |




| Quote: Originally posted by obsessed_chemist |
| Quote: Originally posted by obsessed_chemist |
| Quote: Originally posted by obsessed_chemist |
| Quote: Originally posted by obsessed_chemist |
| Quote: Originally posted by obsessed_chemist |
| Quote: Originally posted by obsessed_chemist |
| Quote: Originally posted by Stasis |